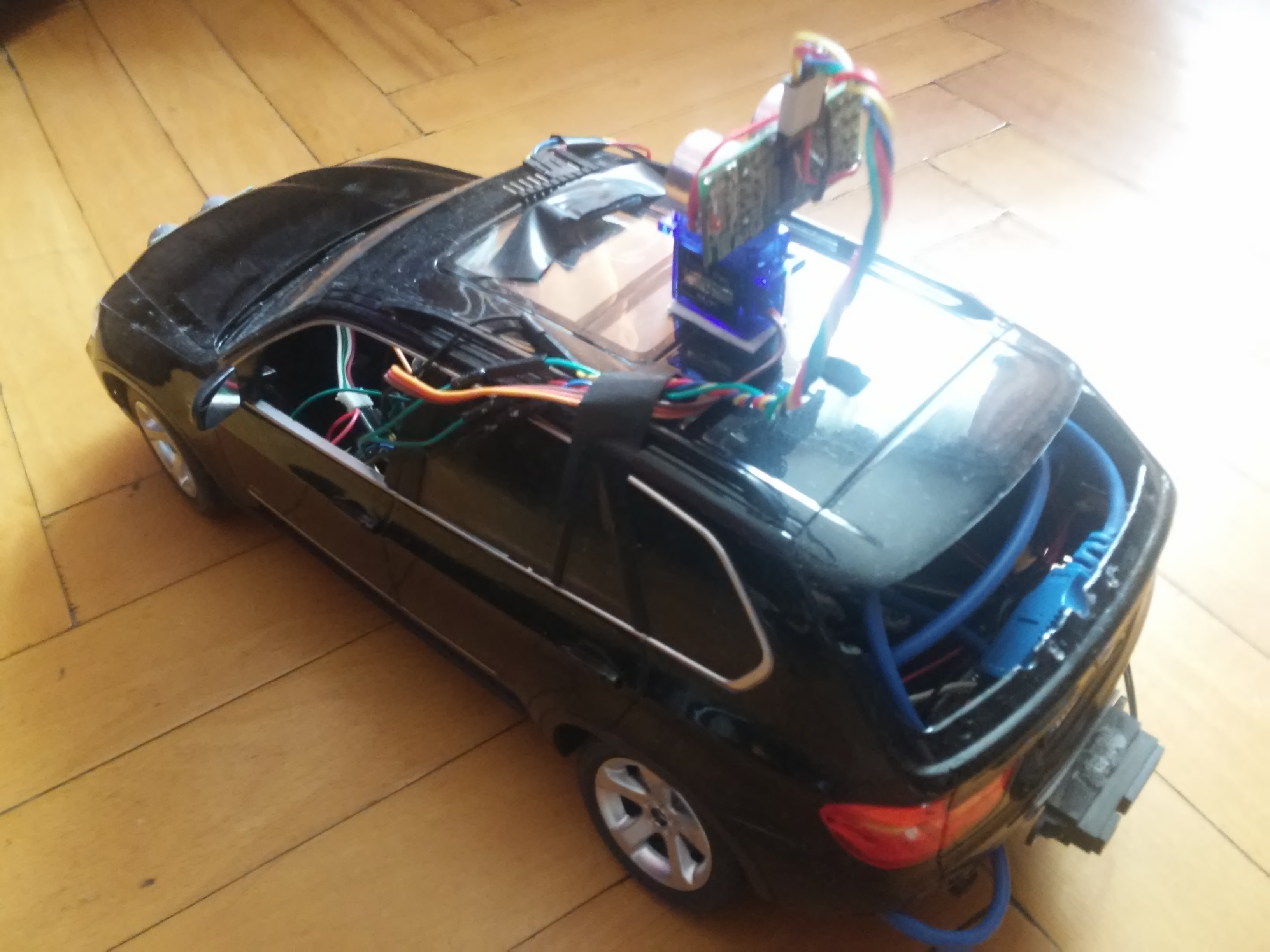
В качестве базы - корпус от машинки на радиоуправлении (масштаб 1:14)
Внутри - ArduinoMega
Есть самодельный радар (на крыше), датчики препятствий (передний и задний бамперы).
Поворот - серво.
Есть компас, гиро, однако пока не могу решить проблему низкого расположения датчиков и влияния на них электропроводки соседей и прочих неприятностей. По этой же самой причине потратил неделю(!!!) на разбор и калибровку модели 3D облака показаний. В прошивку внесены базовые функции (а-ля примитивные инстинкты - избегания препятствия, датчик света и необходимости включения фар, расчет скорости по оборотам колес и обмен данными и командами с "мозгом" через BlueTooth)
Основная программа - расположена на ПК и общается с роботом по Bluetooth, принимает данные датчиков, анализирует и дает команды.